مهندسی مکانیک >>> دزفول
تخصصی +خصوصیمهندسی مکانیک >>> دزفول
تخصصی +خصوصیسنسور شتاب سنج و کتاب اصول پیشرانش در موشکها و سفینه ها
![]()
![]()
![]()
![]()
![]()
![]()
سنسور شتاب سنج، شتاب (همان تغییرات آنی سرعت) هر جسمی را که روی آن نصب شده است را اندازه می گیرد. چطور آن کار می کند؟ درون یک شتاب سنج یک وسیله به نام MEMS است که یک میکروسازه است که بوسیله ممنتوم و گرانش خم می شود. هنگامی که با هرگونه شتابی مواجه می شود. این میکروسازه با یک مقدار متناسبی خم می شود که این مقدار توسط سیگتال الکتریکی شناسایی می شود. امروزه شتاب سنج ها به آسانی و ارزان موجود هستند.
کاربرد شتاب سنج:
شتاب سنج در جهان سنسورها بسیار مهم است. زیرا می تواند محدوده زیادی از حرکات را حس کند. مثلا در آخرین لپ تاپ شرکت Apple برای شناسایی حرکات ناگهانی لپ تاپ ، استفاده شد. بنابراین هارد لپ تاپ در هنگام ضربه های ناگهانی قفل می شود. در دوربین های عکاسی دیجیتال نیز استفاده می شود. برای پایداری تصویر. در گام شمار ها نیز استفاده می شود.
و در ادامه
دانلود کتاب زیبای "Rocket and Spacecraft Propulsion"
اصول پیشرانش درموشکها و سفینه ها
قطعه پیشران در پایین عکس های پایینی مشخص است

ادامه ... و دانلود کتاب در ادامه مطلب>>>
اخیرا در بازی های کامپیوتری نیز برای شناسایی حرکات کج شدن دسته استفاده می شود. در اتومبیل برای رها کردن کیسه هوا هنگام ترمز ناگهانی نیز استفاده می شود. در ایجا چندین مورد استفاده از سنسور شتاب سنج خصوصا در رباتها آورده می شود:
1. رباتهای خود متعادل
2. هواپیماهای مدل بدون سرنشین
3. سیستم هشدار
4. کشف برخورد
5. ردیابی حرکات انسان
6. سنسور تراز یا تعیین سطح افق
7. کشف ارتعاشات برای عایقهای ارتعاشی
8. کشف کننده شتاب زمین
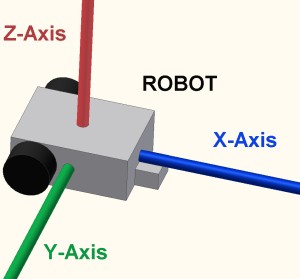
محورهای شتاب:
میکروسازه کوچک فقط در یک جهت می تواند نیرو را اندازه بگیرد یا جهت شتاب را. یعنی با اندازه گیری یک جهت ، شما فقط می توانید نیروی در یکی از جهات X، Yیا Z را بدانید نه همه جهات . بنابراین اگر ربات شما فقط شتاب سنج در جهت X داشته باشد می تواند برخوردهای در این راستا را شناسایی کند ولی اگر ربات دیگر از جهت کناری با ربات ما ضربه زند ، نمی تواند مقدار آن را درک کند. موارد زیادی است که شتاب سنج یک جهته کافی نیست. همیشه یک ایده خوب این است که حداقل از شتاب سنج در دو محور عمود بر هم استفاده شود.
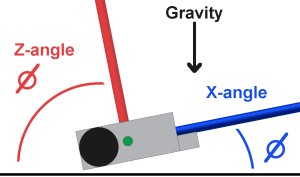
گرانش:
گرانش یک شتاب است. ربات همواره با یک شتاب9.81m/s^2 - مواجه است که علامت منفی آن به این دلیل است که جهت آن به سمت زمین است. بنابراین ربات همواره می تواند زاویه تراز خود را با جهت شتاب گرانش مشخص کند. اگر ربات شما یک ربات دو پا باشد که بخواهید همواره متعادل باشد. به سادگی کافی است که از یک شتاب سنج دو جهته استفاده کنید. در جهتهای X و Y و همواره جهت شتاب صفر را پیدا کنید که ربات در ان جهت متعادل است.
موقعی که شتاب سنج خود را می خرید. متوجه می شوید که چیزی مانند شتاب مجاز 2g و 3g روی ان نوشته شده یا فروشنده به شما می گوید. این سنسور چه مقدار شتاب را تا قبل از شکستن می تواند کنترل کند؟ برای مثال اگر ربات شما با شتاب 1g بالا می رود معنیش ان است که شتاب سنج شما دارد شتاب 2g را حس می کند( اصل دالامبر) برای بیشتر کارهای رباتیک شتاب سنج 2g کافیست.
محاسبه شتاب خطی و زاویه تراز جسم
برای محاسبه بزرگی شتاب در شتاب سنج تک جهته
acceleration_max = sqrt(x^2) = x
برای شتاب سنج دو جهته
acceleration_max = sqrt(x^2+y^2
برای سه جهته
acceleration_max = sqrt(x^2+y^2+z^2
برای محاسبه مقدار شتاب حاصل از گرانش در جهت X:
g_x = -g*sin(fi
اگر این معادله را برعکس کنیم می توانیم زاویه تراز(فی) را بیابیم
Fi= arcsin(g_x / -g
به این ترتیب هرچه سر ربات ما بالاتر رود شتاب سنج مقدار بیشتر را نشان میدهد. و در جهت افق سهم شتاب گرانش در داده های شتاب سنج X صفر میشود.
MEMS IC's موجود و بادوام است و گاها این نوع شتاب سنج در سه جهت همراه با یک ژیروسکوپ هم ارائه میشود. همه شتاب سنج ها یک سیم برای توان و یک سیم ارت دارند. و یک خروجی آنالوگ برای هر محور نیز دارند.
و در ادامه
دانلود کتاب زیبای "Rocket and Spacecraft Propulsion"
اصول پیشرانش درموشکها و سفینه ها
قطعه پیشران در پایین عکس های پایینی مشخص است


"قابل توجه دوستان"
زبان کتاب :english
حجم :12.6mb
سلام
مهندس دارم دانلود میکنم ویروس نیاد رو سیستمم
با نرم افزار dapدارم دانلود میکنم داره اخطار وچیزای عجیب میگه که تاالان نگفته بود
مشکلش بر طرف شد
باران منظورت رو از ویروس متوجه نمیشم .برا چی ویروس بیاد تو سیستمت؟؟؟؟؟؟ فایلش کامل لود نشده و باز نشده ولی الان مشکلش بر طرف شد و قابل برداشت
مهندس این پست مطالعه کردم
ببین دوستان وکسایی که هم رشته ات باشن ولینک دوستات هم که داری میان اینجا سر بزنن؟؟؟
اخه من نظرم اینه که خیلی تخصصی کار میکنی
من میگم یکم سبکتر بنویس این نظر منه
دیگه هرطور صلاح میدونی
مثلا" محمد جواددبیرستانیه خب هنوز بعضی چیزارو نمیشناشه در مکانیک یا فیزیک خود منم دوست دارم ساده تر مطالب باز کنی
اما خب اگر دوستای خودت میان میبینن حسابش سواست
یک پیشنهاد دوستانه بود
چرا میان ولی متاسفانه نظر نمیدن

موضوع رو نگا میکنن اگه بدرد بخور بود مطالعش میکنن و اگه نبود سریع صفحه رو میبندن
باشه از این به بعد سعی میکنم این کار رو بکنم
تشکر از پیشنهادت
این چیه من دانلود کردم سامان ؟؟؟؟؟؟؟؟
عکس است؟
مطلب است؟
فیلم است؟
سرکاریه؟؟؟؟؟؟؟؟؟؟؟/
شرمنده فایلش درست آپلود نشده بود
کتاب لاتین هستش و تعداد صفحاتش ۳۹۰
حجم ۱۲.۶ مگابایت
الان قابل برداشته و فایل اون اصلاح شده
اگه به این بحث ها علاقه داری این کتاب کتاب بسیاز زیبا و مفیدی هستش
سامان جان من وقتی دانلود میکردم ترسیدم ویروس بیاد تو سیستمم اخه به انتی ویروسم اعتماد ندارم
نترس اگه طالب علمی باید ویروس و این حرف ها رو بیخیال باشی

تو به من اعتماد داشته باش و توکلت به خدا باشه باران جان
مهندس امشب هستی؟؟
من هستم تونستی توضیح بدهید
باتشکر باران جون
(تا 12 باید باشم شایدم بیشتر
امشب یه ذره باید زود تر بخوابم که فردا باید زود پاشم
ولی فردا حتما سعی میکنم که باشم.
شرمنده باران جان . ولی تا 10 دقیقه دیگه هستم . اگه سئوالی داری بپرس
میبینم هستی؟؟
اگر برات ممکن بود بیا توی وب من توضیح بده همون مبحث رو کارتم دارم
باتشکر باران خانم
باشه. اومدم
هیچی می خواستم همون حرکت شیبدار و سطح افقی رو بگی میدونی کدوم میگم؟؟ اگر میخوای بزار واسه فرصت دیگه
باشه تو این مثال با نسبت گرفتن سرعت B و A را محاسبه کرده که خیلی هم ساد است تو کدوم قسمتش مشکل داری تو زوایاش یا ...؟ این بخش تو بخش سرعت کتاب دینامیک هستش ولی این مثال یه مثال ساده تو کتاب دینامک هستش
خواستی بگو تو کدوم قسمتش مشکل داری تا برات بیشتر توضیحش بدم
اکی بعد میگم کجاش شما عجله داری
بای
راستی من همیشه توکلم به خدا هست مهندس
بگو تا 5 دقیقه دیگه هستم

سامان من تو 5دقیقه چی بگم تو چی توضیح بدی من بدم میاد هولم میکنی
مرسی یک روز دیگه مهندس جان
بای
باشه
تو سئوالت رو با جزئیات رو یک برگ بنویس وpdf اون رو بفرست به آدرس ایمیلم
تا با توضیحات کامل برات بفرستمش
ok?
پس اون شکلک چیه این میگم


کلاس میزاری مهندس؟؟
من ایمیل تورو از کجا دارم؟؟؟
همون ok خودمونه یا به اصطلاح خودمونی چشمک
یه ذره دقت بکنی توی وبلاگم هستش
m.porsoltan@yahoo.com
سامان ایمیل من اومد؟؟
من یادم نمیاد کی ایمیل نوشته باشم!!!!!!!
فقط برای گیسو نوشتم وذخیرش کردم اینجا اومد؟؟؟؟ یک لحظه دیدمش ارسال کردم مگه میشه؟؟؟
الان خیلی وقته که آدرس ایمیلتون رو همراه با وبلاگتون مینویسین

ولی الان نیستش
من اینقدر پرتم
جدی سوال دارم وقتی اطلاعات را در کامنتدونی دیگه ذخیره کنی در وبلاگهای دیگه که بخش مدیریت یکی باشه میاد؟
نه من همچین منظوری نداشتم
اره همینطوره که تو میگی تو وبلاگ های دیگه هم ثبت میشه مگه اینکه تیک ثبت مشخصاتت رو برداری
البته این مشکل فقط تو سرویس بلوگ اسکای هستش
به به مهندس جوان ! حال شما ؟ احوال شما ؟






.
الان این چیزایی که نوشتی یعنی چی اونوقت ؟؟
من قیافه ام اینطوری شده
من که از این پستهای تو هیچی سر در نمیارم ! فقط اومدم یه سری بزنم و برم
به بحث علمی با باران ادامه بده فقط یادت نره وسطش یه کیک و آب پرتقالی بخورید که یه وقت فشارتون نیفته
سحر خانوم چیز پیچیده ای نیستن

یه بحث ساده در مورد شتاب سنج و معرفی یک کتاب
مگه تو سوپر مارکت داریم تبادل اطلاعات میکنیم که کیک و ساندیس بخوریم
اینجا هیچی برای تجدید قوا نیست
باشه از این به بعد در مورد چیز های عمومی تر کامنت میزارم
عجب پس باید تیک رو برداشت نمیدونستم

 باید صبور باشیم
باید صبور باشیم 

بلوگ اسکای :
سامان چرا اینقدر زود نارحن(ناراحت گفتم غلط نگیری) میشی؟؟ پسرم ماداریم تبادل علمی میکنیم در این مسیر طاقت فرسا
سحر از این ورا
من موندم تو چقدر نگران شکم من ومهندسی ما در این مسیر صبر ایوب داریم
به نظر تو من ناراحت گشتم؟؟؟؟؟؟؟؟؟؟؟؟؟؟

سحر خانوم خیلی دختر دلسوزی هستن
ایمیل هایی که زحمت کشیدم فرستادم رسید؟؟
سلام باران خانوم تشکر از ایمیل هات
از ایمیل معلم خوشم اومد واقعا آموزنده بود
ولی سوال که میخواستی بپرسی توشون نبود!!!
سلام
خودم اون قسمت رادر موردش فکر کنم میفهمم اگر نتیجه نداد ایمیل میدم
بسیار خوب
سلام مهندس جوان و ایضاهم استانی خوبید؟



راستش اومدم واسه عرض ادب و سلام علیک و این حرفا!! پستو خوندم این مدلی شدم
دیگه شرمنده ما مخ ریاضی فیزیکمون بعد دبیرستان تعطیل شد زیاد از این مطالب سر در نمیاریم
ولی درکل بسیار خوب نوشته بودید و چون از تصاویر هم استفاده کرده بودید بر جذابیت مطلب می افزود امیدوارم مورد پسند اونهایی که قراره از این مطالب استفاده کنند هم قرار بگیره.....
روز و روزگارتون خوش
سلام مستانه خانوم
چرا ؟ خدا نکنه اون مدلی که گفتی بشی
تشکر مرسی از نظر ت وهمچنین
نچ نچ نچ نچ چقدر تخصصی بود
وقتی همش میگی از ریاضی بدم میاد از شیمی بدم میاد از فیزیک بدم میاد و ...

نتیجش همینه محمد جون
مبحث به این سادگی و زیبایی رو می گی نچ نچ نچ
شوخی کردم محمد جان بسیار خوب از این به بعد موضوعاتم رو جنرال تر انتخاب میکنم
ولی هدف من اینه که شما وقتی به وبلاگم میاین یه استفاده ای بکنین و دست پر برین
مهندس من از زیست و شیمی خیلی لذت می برم


ریاضی فیزیک هم دوست دارم فقط از عربی بدم میاد.
مهندس خیلی دوست دارم با مکانیک اشنا بشم ایشالا بعد امتحانات.
به امید خدا
من که امروزدست خالی رفتم
درجواب که به محمد میگی دست پر برید)
حالا دیگه تیکه میندازی باران خانوم؟
علیک سلام باران جان
سلام مهندس هستی؟؟ خبرم کن کارت دارم
سلام دوست عزیز
بله هستم ولی زیاد نمیمونم و زودی میخوام برم
چرا آدرس نگذاشتی که خبرت بکنم؟؟؟